用树莓派 DIY 波士顿动力机器狗,帮你省下 50 万
|
然后从显示选项进行以下更改:Interfacing options → Enable I2C
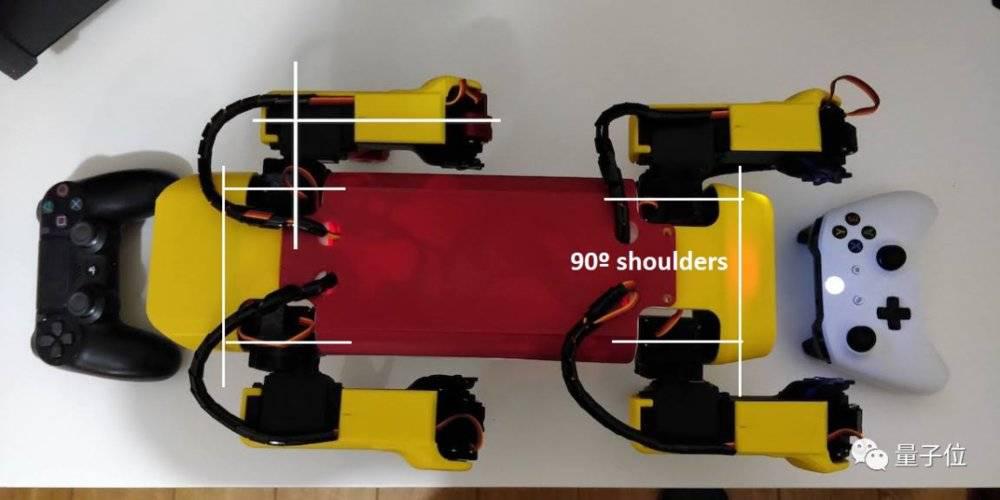
再按照下图的方式将所有硬件和树莓派连接起来:
机器狗外壳的 3D 打印文件也同时附送,作者建议使用 0.6mm 的喷嘴,层高设置为 0.3mm,可以最大限度地加快打印速度。
完成硬件组装后就是软件调试部分。 先下载 JSON 的格式的默认配置文件,将该文件放在用户主目录下。 打开校准工具,对 12 个伺服点击进行校准,找到机器狗 " 休息 " 时电机的初始位置。 cd ~/spotmicroai/calibration./calibration.sh
经过校准后的机器狗,就可以做出各种动作了。
等等,给机器狗尾部安装的显示屏有什么用呢?其实它可帮我们快速看到机器狗当前的状态。
比如,在上面的面板里,我们能看到树莓派 CPU 当前的温度、与外部控制器的连接状态、伺服控制板状态,等等。 至此迷你机器狗就大功告成了。如果你不仅想组装它,还想学习更高阶的开发教程,那么可以去看一下 Extra 里的内容。 下一步计划 现在 Mike 的迷你机器狗只能做一些简单的动作,Mike 下一步的计划是让它和波士顿动力的机器狗一样智能。Mike 未来的目标是: 1. 加入激光雷达,通过 SLAM 实现房间的简单 2D 映射。就像原版的波士顿动力机器狗一样。 现在已经有人实现了 Mike 的第一个目标:
2. 开发自动运动模块,指导机器人围绕感测到的 2D 环境执行简单任务。例如在房间中导航,并避免撞到障碍物。 3. 结合摄像头或网络摄像头创建软件模块,进行基本的图像分类。例如,感知到拳头的闭合和张开,让机器人对某个动作做出特定反应,实现手势控制。 网友:整起来 自己动手 DIY" 波士顿动力狗 ",这样的实践连树莓派官方都点了赞。
网友们则纷纷表示:鹅妹子嘤,这真的很酷。 也有人迫不及待,打算自己动手做起来了。 (编辑:应用网_阳江站长网) 【声明】本站内容均来自网络,其相关言论仅代表作者个人观点,不代表本站立场。若无意侵犯到您的权利,请及时与联系站长删除相关内容! |